Виды геометрических моделей и их свойства. Геометрическая модель местности. Способы наблюдения и измерения снимков и стереомодели. Параллаксы точек. Модели представления информации о трехмерных объектах
Для решения задач комплексной автоматизации машиностроительных производств необходимо построить информационные модели изделий. Машиностроительное изделие как материальный предмет должен быть описан в двух аспектах:
Как геометрический объект;
Как реальное физическое тело.
Геометрическая модель необходима для задания идеальной формы, которой должно было бы соответствовать изделие, а модель физического тела должна дать характеристику материала, из которого изготовляется изделие, и допустимые отклонения реальных изделий от идеальной формы.
Геометрические модели создаются с помощью программных средств геометрического моделирования, а модели физического тела с помощью средств создания и ведения баз данных.
Геометрическая модель, как разновидность модели математической, охватывает определенный класс абстрактных геометрических объектов и отношений между ними. Математическое отношение - это правило, связывающее абстрактные объекты. Они описываются с помощью математических операций, связывающих один (унарная операция), два (бинарная операция) или более объектов, называемых операндами, с другим объектом или множеством объектов (результатом операции).
Геометрические модели создаются, как правило, в правой прямоугольной системе координат. Эти же системы координат используются в качестве локальных при задании и параметризации геометрических объектов.
В табл.2.1 приведена классификация базовых геометрических объектов. По размерности параметрических моделей, необходимых для представления геометрических объектов, они делятся на нульмерные, одномерные, двумерные и трехмерные. Нульмерные и одномерные классы геометрических объектов могут моделироваться как в двух координатах(2D) на плоскости, так и в трех координатах(3D) в пространстве. Двумерные и трехмерные объекты могут моделироваться только в пространстве.
Язык СПРУТ для геометрического моделирования машиностроительных изделий и оформления графической и текстовой документации
Существует значительное количество систем компьютерного геометрического моделирования, наиболее известными из которых являются Auto- CAD, ANVILL, EUCLID, EMS и др. Из числа отечественных систем этого класса наиболее мощной является система СПРУТ, предназначенная для автоматизации конструирования и подготовки управляющих программ для станков с ЧПУ.
Нульмерные геометрические объекты
На плоскости
Точка на плоскости
Точка на линии
Точка, заданная одной из координат и лежащая на прямой
В пространстве
Точка в пространстве
Точка, заданная координатами в базовой системе
P3D i = Xx,Yy,Zz
Точка на линии
Точка, заданная как n-я точка пространственной кривой
P3D i = PNT,CC j,Nn
Точка на поверхности
Точка, заданная как точка пересечения трех плоскостей;
P3D i = PLs i1,PLs i2,PLs i3
Таблица 2.1 Геометрические объекты в среде спрут
|
Размер-ность объекта |
Размерность пространства |
Вид объекта |
Оператор СПРУТ |
|
На плоскости(2D) |
Точки на плоскости |
Pi = Xx, Yy; Pi = Mm, Aa |
|
|
[подсистема SGR] |
Точки на линии |
Pi = Xx, Li; Pi = Ci, Aa |
|
|
В пространстве(3D) |
Точки в пространстве |
P3D i = Xx,Yy, Zz |
|
|
[подсистема GM3] |
Точки на линии |
P3D i = PNT,CC j,Nn |
|
|
Точки на поверхности |
P3D i = PLS i1,PLS i2,PLS i3 |
||
|
На плоскости(2D) |
|||
|
[подсистема SGR] |
Окружности |
||
|
Ki = Pj, -Lk, N2, R20, Cp, Pq |
|||
|
Ki = Mm, Lt, Pj, Pk,..., Pn, Cq |
|||
|
Кривые 2-го порядка |
CONIC i = P i1, P i2, P i3, ds |
||
|
В пространстве(3D) [подсистема GM3] |
P3D i = NORMAL,CYL j,P3D k; P3D i = NORMAL,Cn j,P3D k; P3D i = NORMAL,HSP j,P3D k; P3D i = NORMAL,TOR j,P3D k |
||
|
L3D i = P3D j,P3D k |
|||
|
CC i = SPLINE,P3D i1,...,P3D j,Mm |
|||
|
Параметрическая кривая на поверхности |
CC n = PARALL, BASES=CCi, DRIVES=CCk, PROFILE=CCp, STEPs |
||
|
Линии пересечения поверхностей |
SLICE K i, SS j, Nk, PL l; INTERS SS i, SS j, {L,} LISTCURV k |
||
|
Проекция линии на поверхность |
PROJEC Ki, CC j, PLS m |
||
|
Проволочные модели |
SHOW CYL i; SHOW HSP i; SHOW CN i; SHOW TOR i |
||
|
Двух -мерные |
В пространстве [подсистема GM3] |
Плоскости |
PL i = P3D j,L3D k |
|
Цилиндры |
CYL i = P3D j,P3D k,R |
||
|
CN i = P3D j,R1,P3D k,R2; CN i = P3D j,R1,P3D k,Angle |
|||
|
HSP i = P3D j,P3D k,R |
|||
|
TOR i = P3D j,R1,P3D k,R1,R2 |
|||
|
Поверхности вращения |
SS i = RADIAL, BASES = CC j, DRIVES = CC k, STEP s |
||
|
Линейчатые поверхности |
SS i = CONNEC, BASES = CC j, BASES = CC k, STEP s |
||
|
Фасонные поверхности |
SS i = PARALL, BASES = CC j, DRIVES = CC k, STEP s |
||
|
Поверхности тензорного произведения |
|||
|
Трех-мерные |
В пространстве [подсистема SGM] |
Тело вращения |
SOLID(dsn) = ROT, P3D(1), P3D(2), SET, P10, m(Tlr) |
|
Тело сдвига |
SOLID(dsn) = TRANS, P3D(1), P3D(2), SET, P10, M(Tlr) |
||
|
Тело цилиндрическое |
SOLID(dsn) = CYL(1), M(Tlr) |
||
|
Тело коническое |
SOLID(dsn) = CN(1), M(Tlr) |
||
|
Тело сферическое |
SOLID(dsn) = SPHERE(1), M(Tlr) |
||
|
Тело торическое |
SOLID(dsn) = TOR(1), M(Tlr) |
Одномерные геометрические объекты
На плоскости
Векторы Вектор переноса MATRi = TRANS x, y
Линии Простые аналитические
Прямая (всего 10 способов задания)
Прямая, проходящая через две заданные точки Li = Pi, Pk
Окружность (всего 14 способов задания)
Окружность, заданная центром и радиусом Ci = Xx, Yy, Rr
Кривая второго порядка (всего 15 способов задания)
Кривая второго порядка, проходящая через три точки с заданным дискриминантом Conic i = P i1, P i2, P i3, ds
Составные Контуры - последовательность сегментов плоских геометрических элементов, начинающихся и заканчивающихся точками, лежащими на первом и последнем элементе соответственно K23 = P1, -L2, N2, R20, C7, P2 Кусочно-полиномиальные
Сплайн. Первым параметром в операторе является идентификатор "M", который указывает величину отклонения при аппроксимации отрезками сплайн-кривой. Далее следует начальное условие (прямая или окружность), затем перечисление точек в той последовательности, в которой они должны быть соединены. Заканчивается оператор определением условия на конце сплайн-кривой(прямая или окружность) Ki = Mm, Lt, Pj, Pk,..., Pn, Cq
Аппроксимация дугами Ki = Lt, Pj, Pk,..., Pn
В пространстве Векторы Вектор направления
Вектор единичной нормали в точке к полусфере P3D i = NORMAL,HSP j,P3D k Вектор единичной нормали в точке к цилиндру P3D i = NORMAL,CYL j,P3D k Вектор единичной нормали в точке к конусу P3D i = NORMAL, Cn j,P3D k Вектор единичной нормали в точке к тору P3D i = NORMAL,TOR j,P3D k Вектор переноса MATRi = TRANS x, y, z Линии
Независимые Прямая (всего 6 способов задания)
По двум точкам L3D i = P3D j,P3D k Сплайн-кривая CC i = SPLINE,P3D i1,.....,P3D j,mM На поверхности Параметрическая CC n=PARALL,BASES=CCi,DRIVES=CCk,PROFILE=CCp,STEPs Пересечение 2-х поверхностей Контур сечения поверхности плоскостью SLICE K i, SS j, Nk, PL l где N k - номер сечения Линия пересечения 2-х криволинейных поверхностей (результат список пространственных кривых) INTERS SS i,SS j,L,LISTCURV k ; где L - уровень точности; 3<= L <= 9;
Проекции на поверхность Проекция пространственной кривой на плоскость с системой координат PROJEC Ki,CC j,PLS m.
Составная
Проволочные модели Каркас Отображение цилиндра на экране в виде проволочной модели SHOW CYL i Отображение полусферы на экране в виде проволочной модели SHOW HSP i
Отображение конуса на экране в виде проволочной модели SHOW CN i
Отображение тора на экране в виде проволочной модели SHOW TOR
Двумерные геометрические объекты (поверхности)
Простые аналитические Плоскость (всего 9 способов задания)
По точке и прямой PL i = P3D j,L3D k
Цилиндр(по двум точкам и радиусу) CYL i = P3D j,P3D k,R
Конус Задается по двум точкам и двум радиусам; или по двум точкам, радиусу и углу в вершине CN i = P3D j,R1,P3D k,R2; CN i = P3D j,R1,P3D k,Angle
Сфера (полусфера) Задается по двум точкам и радиусу HSP i = P3D j,P3D k,R
Тор Задается по двум точкам и двум радиусам; вторая точка вместе с первой определяет ось тора TOR i = P3D j,R1,P3D k,R1,R2
Составные Кинематические Поверхности вращения SS i = RADIAL, BASES = CC j, DRIVES = CC k, STEP s
Линейчатые поверхности SS i = CONNEC, BASES = CC j, BASES = CC k, STEP s
Фасонные поверхности SS i = PARALL, BASES = CC j, DRIVES = CC k, STEP s
Кусочно-полиномиальные Поверхности тензорного произведения (сплайновые поверхности по системе точек) CSS j = SS i
Таблица 2.2 Геометрические операции в среде спрут
|
ОПЕРАТОР СПРУТ |
|||
|
Преобразо вания |
Масштабирова-ние |
||
|
MATRi = TRANS x, y, z |
|||
|
Вращение |
MATRi = ROT, X Y Z, Aa |
||
|
Отображение |
MATRi = SYMMETRY, Pli |
||
|
Проекции |
Параллельные |
VECTOR P3Di, INTO P3Dj |
|
|
L = SURFAREA |
|||
|
параметров |
S = SURFAREA |
||
|
S = SURFAREA |
|||
|
S = AREA |
|||
|
VS = VOLUME |
|||
|
Момент инерции |
SURFAREA |
||
|
SURFAREA |
|||
|
INERC SOLID i,L3d i1,INLN |
|||
|
INERC SOLID i, P3Dj |
|||
|
Центр масс |
CENTRE SOLID i,P3D j |
||
|
SURFAREA |
|||
|
БИНАР-НЫЕ |
Расчеты параметров |
Расстояние |
S = DIST P3Di, P3Dj |
|
S = DIST P3Di, L3Dj |
|||
|
S = DIST P3Di, Pl j |
|||
|
S = DIST P3Di, SS j |
|||
|
S = DIST P3Di, P3Dj |
|||
|
Ang = SURFAREA |
|||
|
Пересечение |
Двух линий |
Pi = Li, Lj; Pi = Li, Cj; |
|
|
Pi = Ki, Lt, Nn; Pi = Ki, Ct, Nn; |
|||
|
Pi = Ki, Kt, Nn; Pi = Ki, Lt, Nn |
|||
|
P3D i = L3D j,PL k |
|||
|
поверхностью |
P3D i = L3D j,HSP k,n |
||
|
P3D i = L3D j,CYL k,n |
|||
|
P3D i =L3D j,CN k,n; P3D i =CC i ,PL j |
|||
|
L3D i = PL j, PL k |
|||
|
поверхностей |
INTERS SS i,SS j,{L,}LISTCURV k |
||
|
CROS SOLID(Top+2), RGT, SOLID(Top+3), RGT; |
|||
|
Вычитание |
Тела из тела |
CROS SOLID(Top+2), RGT, SOLID(Top+3); SOLID(Top+1) = SOLID(Top+2), SOLID(Top+3) |
|
|
Сложение |
CROS SOLID(Top+2), SOLID(Top+3); SOLID(Top+1) = SOLID(Top+2), SOLID(Top+3) |
||
|
Отсечение |
Тела плоскостью |
CROS SOLID(Top+1), PL(1), SET |
|
|
Объединение |
Двух поверхностей |
SSi=ADDUP,SSk,SSj,STEPs,a Angl |
|
|
Объединение |
Объединение поверхностей |
SS i = ADDUP,SS k,....., SS j,STEP s ,a Angl |
Способы представления и передачи информации о геометрической форме изделия
Исходные данные о геометрической форме изделия, могут поступать в САМ-систему в формате Boundary Representation (B-Rep). Изучим этот формат более подробно.
Автором были рассмотрены структуры данных геометрического ядра ACIS фирмы Spatial Technology, геометрического ядра Parasolid фирмы Unigraphics Solutions, геометрического ядра Cascade фирмы Matra Datavision и представление модели в спецификации IGES. Во всех четырех источниках представление модели очень схоже, имеются лишь небольшие отличия в терминологии, в ядре ACIS имеются непринципиальные структуры данных связанные с оптимизацией вычислительных алгоритмов. Минимальный список объектов, необходимый для представления B-Rep модели представлен на Рис. 1. Его можно разделить на две группы. В левом столбце представлены геометрические объекты, а в правом топологические.
Рис. 1. Геометрические и топологические объекты.
Геометрическими объектами являются поверхность (Surface), кривая (Curve) и точка (Point). Они самостоятельны и не ссылаются на другие составляющие модели, именно они определяют пространственное расположение и размеры геометрической модели.
Топологические объекты описывают то, каким образом геометрические соединяются в пространстве. Сама по себе топология описывает структуру или сетку, которая никоим образом не зафиксирована в пространстве.
Кривые и поверхности. Как известно, существуют два наиболее общих метода представления кривых и поверхностей. Это неявные уравнения и параметрические функции.
Неявное уравнение кривой лежащей в плоскости xy имеет вид:
Это уравнение описывает неявное отношение между координатами x и y точек лежащих на кривой. Для данной кривой уравнение уникально. Например, окружность с единичным радиусом и центром в начале координат, описывается уравнением
В параметрической форме, каждая из координат точки кривой представляется отдельно как явная функция параметра:
Векторная функция от параметра u .
Хотя интервал произвольный, он обычно нормализуется до. Первый квадрант окружности описывается параметрическими функциями:

Установим, получим другое представление:
Таким образом, представление кривой в параметрическом виде не уникально.
Поверхность также может быть представлена неявным уравнением в форме:
Параметрическое представление (не уникальное) дается как:
Заметим, что для описания поверхности необходимы два параметра. Прямоугольную область существования всей совокупности точек (u,v), ограниченную условиями и будем называть областью или плоскостью параметров. Каждой точке в области параметров будет соответствовать точка на поверхности в модельном пространстве.

Рис. 2. Параметрическое задание поверхности.
Зафиксировав u и изменяя v , получаем поперечные линии, зафиксировав v и изменяя u , получаем продольные линии. Такие линии называют изопараметрическими.
Для представления кривых и поверхностей внутри B-Rep модели наиболее удобна параметрическая форма.
Топологические объекты. Тело (Body) - это ограниченный объем V в трехмерном пространстве. Тело будет корректным в том случае, если этот объем замкнутый и конечный. Тело может состоять из нескольких, не касающихся друг друга кусочков (Lumps), доступ к которым необходимо обеспечить как к единому целому. На рисунке изображен пример тела состоящего из более чем одного кусочка.

Рис. 3. Четыре кусочка в одном теле
Кусочек (Lump) - это единая область в трехмерном пространстве, ограниченная одной или более оболочками (Shells). Lump может иметь неограниченное количество пустот. Таким образом, одна оболочка кусочка является внешней, остальные внутренними.

Рис. 4. Тело, состоящее из двух кусочков
Оболочка (Shell) - это множество ограниченных поверхностей (Faces), объединенных между собой посредством общих вершин (Vertexes) и ребер (Edges). Нормали к поверхностям оболочки должны быть направлены от зоны существования тела. Ограниченная поверхность (Face) - это участок обычной геометрической поверхности, ограниченный одной или несколькими замкнутыми последовательностями кривых - петлями (Loops). При этом петля может задаваться кривыми, как в модельном, так и в параметрическом пространстве поверхности. Ограниченная поверхность в своей сути является двухмерным аналогом тела. Она также может иметь одну внешнюю и множество внутренних зон ограничений.

Рис. 5. Ограниченная поверхность
Петля (Loop) - является участком зоны ограничения Face. Она представляет собой множество параметрических ребер объединенных в двухсвязную цепочку. Для корректного тела она должна быть замкнутой.
Параметрическое ребро (Coedge) - это запись, соответствующая участку петли. Оно соответствует ребру геометрической модели. Параметрическое ребро имеет ссылку на двухмерную геометрическую кривую, соответствующую участку зоны ограничения в параметрическом пространстве. Параметрическое ребро ориентировано в петле таким образом, что если смотреть вдоль ребра по его направлению, то зона существования поверхности будет находиться слева от него. Таким образом, внешняя петля всегда направлена против часовой стрелки, а внутренние по часовой.
Параметрическое ребро (Coedge) может иметь ссылку на партнера, на такой же Coedge, лежащий в другой петле, но соответствующий тому же пространственному ребру. Поскольку в корректном теле, каждое ребро касается строго двух поверхностей, поэтому оно будет иметь строго два параметрических ребра.

Рис. 6. Ребра, параметрические ребра и вершины
Ребро (Edge) - топологический элемент, имеющий ссылку на трехмерную геометрическую кривую. Ребро ограничено с обеих сторон вершинами.
Вершина (Vertex) - топологический элемент, имеющий ссылку на геометрическую точку (Point). Вершина -это граница ребра. Все другие ребра, которые приходят в конкретную вершину, могут быть найдены через указатели параметрических ребер.

Рис. 7. Объектная реализация геометрической модели
В данной диаграмме фигурируют еще два неописанных объекта.
Система координат тела (Transform). Как известно система координат может задаваться матрицей преобразований. Размерность матрицы. Если координаты точки представить в виде вектора-строки, в последнем столбце которого лежит единица, то умножив этот вектор на матрицу преобразований получим координаты точки в новой системе координат.
Матрица может отражать в себе все пространственные преобразования, такие как: поворот, перенос, симметрия, масштабирование и их композиции. Как правило, матрица имеет следующий вид.

Габаритные размеры (Box) - структура данных, описывающая параметры прямоугольного параллелепипеда со сторонами параллельными координатным осям. Фактически это координаты двух точек, расположенных на концах главной диагонали параллелепипеда.
Кривые и поверхности NURBS
В настоящее время наиболее распространенным способом представления кривых и поверхностей в параметрической форме являются рациональные сплайны или NURBS (non-uniform rational b-spline). В виде NURBS с абсолютной точностью могут быть представлены такие канонические формы как отрезок, дуга окружности, эллипс, плоскость, сфера, цилиндр, тор и другие, что позволяет говорить об универсальности данного формата, и исключает необходимость использования иных способов представления.
Кривая в таком виде описывается следующей формулой:

W(i) - весовые коэффициенты (положительные действительные числа),
P(i) - контрольные точки,
Bi - B-сплайновые функции
В-сплайновые функции степени М полностью определяются множеством узлов. Пусть N=K-M+1, то множество узлов представляет собой последовательность не уменьшающихся действительных чисел:
T(-M),…,T(0),…,T(N),…T(N+M).

Рис. 8. (a) кубические базисные функции; (b) кубическая кривая, использующая базисные функции с (a)
Сегмент кривой, представленной в виде NURBS, может быть преобразован в полиномиальную форму без потери точности, то есть представлен выражениями:

где и являются полиномами степени кривой. Способы преобразования кривых из NURBS в полиномиальную форму и обратно подробно описаны в /1/.
Поверхности NURBS представляются аналогичным образом:



Рис. 9. В-сплайновая поверхность: (a) сетка контрольных точек; (b) поверхность
Как видно из рисунков, сложность геометрической формы кривой или поверхности можно оценить по контрольным точкам.
Сегмент поверхности NURBS также может быть представлен в полиномиальной форме:
где и являются полиномами двух переменных и могут быть представлены в виде:

Более подробно свойства NURBS кривых и поверхностей описаны в /1,2/.
Для любой двумерной параметрической кривой, где, и - полиномы существует уравнение, где также полином, которое точно определяет ту же самую кривую. Для любой параметрической поверхности заданной выражением (6) существует уравнение, где также полином, которое точно определяет ту же самую поверхность. Способы получения неявной формы параметрически заданной кривой или поверхности описаны в /33/.
Стандарты передачи геометрической модели
Для сквозной автоматизации процесса подготовки производства, необходимо использование CAD-систем в конструкторских отделах и CAM-систем в технологических. В случае если проектирование ведется на одном предприятии, а изготовление на другом, возможны варианты использования различного программного обеспечения. При этом основной проблемой является несовместимость форматов геометрической модели систем разных фирм. Наиболее часто для решения этой проблемы проектировщик формирует весь набор технической документации в бумажном виде, а изготовитель по полученным чертежам восстанавливает электронную модель изделия. Такой подход очень трудоемкий и сводит на нет все достоинства автоматизации отдельных этапов. Решение подобных задач производится либо посредством программы-конвертора, либо посредством приведения данных к единому стандарту.
Одним из таких стандартов является IGES (Initial Graphics Exchange Specification). Этот стандарт обеспечивает передачу любой геометрической информации, включая аналитические и NURBS поверхности и твердотельные модели в представлении B-Rep. В настоящее время стандарт IGES является общепризнанным и обеспечивает передачу любой геометрической информации. Его поддерживают все наиболее развитые системы автоматизированного проектирования и производства. Тем не менее для решения некоторых производственных задач передачи только геометрической информации недостаточно. Необходимо хранение всей информации об изделии в течение всего его жизненного цикла. Передача подобной информации может быть осуществлена с помощью совсем нового стандарта ISO 10303 STEP, являющегося непосредственным развитием IGES. Однако в России спрос на системы, совместимые со STEP, практически отсутствует. Геометрическая модель может быть передана также и формате STL (формат для стереолитографии). В таком представлении модель представляется как совокупность плоских треугольных граней. Однако представление модели в таком виде, несмотря на очевидную простоту, имеет серьезный недостаток связанный с большим увеличением объема памяти требуемой для хранения модели при небольшом увеличении точности.
Помимо указанных существуют корпоративные форматы хранения и передачи информации о геометрической форме изделия. К ним относятся, например, формат XT ядра Parasolid фирмы Unigraphics Solitions или формат SAT ядра ACIS фирмы Spatial Technology. Ключевым недостатком этих форматов является их ориентированность на продвигающую их фирму, и соответственно, зависимость от нее.
Таким образом, в настоящее время наиболее приемлемым форматом для передачи геометрической информации о форме изделия из одной системы в другую является IGES.
Результатом геометрического моделирования некоторого объекта является математическая модель его геометрии. Математическая модель позволяет графически отобразить моделируемый объект, получить его геометрические характеристики, выполнить исследование многих физических свойств объекта путем постановки численных экспериментов, подготовить производство и, наконец, изготовить объект.
Для того чтобы увидеть, как выглядит объект, нужно смоделировать поток падающих и возвращающихся от его поверхностей лучей света. При этом граням модели можно придать необходимый цвет, прозрачность, фактуру и другие физические свойства. Модель можно осветить с разных сторон светом различного цвета и интенсивности.
Геометрическая модель позволяет определить массово-центровочные и инерционные характеристики проектируемого объекта, выполнить измерения длин и углов его элементов. Она дает возможность произвести расчет размерных цепей и определить собираемость проектируемого объекта. Если объект представляет собой механизм, то на модели можно проверить его работоспособность и выполнить расчет кинематических характеристик.
Используя геометрическую модель, можно поставить численный эксперимент по определению напряженно-деформированного состояния, частот и форм собственных колебаний, устойчивости элементов конструкции, тепловых, оптических и других свойств объекта. Для этого нужно дополнить геометрическую модель физическими свойствами, смоделировать внешние условия ее работы и, используя физические законы, выполнить соответствующий расчет.
По геометрической модели можно вычислить траекторию режущего инструмента для механической обработки объекта. При выбранной технологии изготовления объекта геометрическая модель позволяет спроектировать оснастку и выполнить подготовку производства, а также проверить саму возможность изготовления объекта данным способом и качество этого изготовления. Кроме того, возможна графическая имитация процесса изготовления. Но для того, чтобы изготовить объект, кроме геометрической информации нужна информация о технологическом процессе, производственном оборудовании и многом другом, связанном с производством.
Многие из перечисленных проблем образуют самостоятельные разделы прикладной науки и по своей сложности не уступают, а в большинстве случаев и превосходят проблему создания геометрической модели. Геометрическая модель является отправной точкой для дальнейших действий. При построении геометрической модели мы не использовали физические законы, радиус-вектор каждой точки границы раздела внешней и внутренней частей моделируемого объекта является известным, поэтому при построении геометрической модели нам приходится составлять и решать алгебраические уравнения.
Задачи, в которых используются физические законы, приводят к дифференциальным и интегральным уравнениям, решение которых сложнее решения алгебраических уравнений.
В данной главе остановимся на выполнении расчетов, не связанных с физическими процессами. Мы рассмотрим вычисление чисто геометрических характеристик тел и их плоских сечений: площади поверхности, объема, центра масс, моментов инерции и ориентации главных осей инерции. Эти расчеты не требуют привлечения дополнительной информации. Кроме этого, мы рассмотрим проблемы численного интегрирования, которые приходится решать при определении геометрических характеристик.
Определение площади, центра масс и моментов инерции плоского сечения тела приводит к вычислению интегралов по площади сечения. Для плоских сечений мы располагаем информацией об их границах. Интегралы по площади плоского сечения мы сведем к криволинейным интегралам, которые в свою очередь сводятся к определенным интегралам. Определение площади поверхности, объема, центра масс, моментов инерции тела приводит к вычислению поверхностных и объемных интегралов. Мы будем опираться на представление тела с помощью границ , т. е. на описание тела совокупностью ограничивающих его поверхностей и топологическую информацию о взаимном соседстве этих поверхностей. Мы сведем интегралы по объему тела к поверхностным интегралам по поверхностям граней тела, которые в свою очередь сводятся к двойным интегралам. В общем случае область интегрирования представляет собой связную двухмерную область. Вычисление двойных интегралов численными методами можно выполнить для областей простых типов - четырехугольной или треугольной формы. В связи с этим в конце главы рассмотрены методы вычисления определенных интегралов и двойных интегралов по четырехугольным и треугольным областям. Методы разбивки областей определения параметров поверхностей на совокупности треугольных подобластей рассмотрены в следующей главе.
В начале главы рассмотрим сведение интегралов по площади к криволинейным интегралам и сведение объемных интегралов к поверхностным интегралам. На этом будут базироваться вычисления геометрических характеристик моделей.

Геометрическая модель–
представление о внешних признаках
реального объекта.
Геометрическая компьютерная
модель – представление
информационной модели с
помощью средств компьютерной
графики.
Геометрическое моделирование подразделяется на:
oo
o
проектирование каркасов - геометрическая
модель строится из ограниченного набора
графических примитивов (отрезки, дуги,
конические кривые).
поверхностей - моделирование
многообразий второго порядка (сфер,
цилиндров, конусов и т.д).
объемных тел - основным объектом
моделирования является трехмерное
объемное тело.
Виды и свойства моделей
oЛиниями можно описать отдельные геометрические свойства предметов, представить
характерные черты объектов. Они могут быть пространственными и двумерными. Кривые
линии служат в качестве строительного материала для создания поверхностей и тел.
o
Поверхности, как и линии, являются математическими абстракциями, дающими
представление об отдельных свойствах предметов, и служат строительным материалом
для создания тел.
o
Совокупность стыкующихся по границам поверхностей называется оболочкой. Для
моделирования нужно описать совокупность поверхностей, отделяющих внутренний объем
предмета от остальной части пространства.
o
Для геометрического моделирования предметов, занимающих конечный объем, в
математике используются объекты, называемые твердыми телами или просто телами. При
моделировании тел строятся поверхности, отделяющие занимаемую ими часть
пространства от остальной части пространства.
Модели двумерной графики
РастроваяВекторная
Трехмерная
Фрактальная
Растровая модель
ДостоинстваНедостатки
простота оцифровки (сканирования или жестко фиксированное количество
фотосъемки с возможным
пикселов в растре.
последующим сканированием
отпечатка (слайда)).
возможность очень тонкой
корректировки изображений
интерференция
Простота процедуры преобразования
отсутствие внутренней структуры,
пиксельной модели в изображение при соответствующей структуре
выводе на экран или печать
изображенных объектов
большой объем памяти и длительное
время обработки
Векторная модель
ДостоинстваНедостатки
Достаточно малый объем занимаемой
памяти
Включение в состав векторной модели
множества типов объектов затрудняет
изучение ее устройства
Векторное изображение может быть
структурировано с произвольной
степенью детализации
Построение векторной модели
изображения представляет собой
задачу, плохо поддающуюся
автоматизации
Объекты векторной модели
изображения легко
преобразовываются, их
масштабирование не влечет за собой
ни искажения изображения, ни утраты
визуальной информации
Векторная модель изображения не
дает пользователю инструментов,
соответствующих традиционной
технике живописи
В векторной модели текст,
представляется отдельной категорией
объектовпроцесс эволюции
программ векторной
графики наиболее быстро
движется именно в
направлении повышения
реалистичности
векторных изображений,
и новые объекты
векторной модели
(сетчатые заливки, тени,
градиентная
прозрачность) в
значительной степени
расширяют
изобразительные возможности векторной
Модели представления информации о трехмерных объектах
Полигональные(сетчатые)
Воксельные
Функциональные
Полигональные (сетчатые) модели
Полигональные (сетчатые) модели
ДостоинстваНедостатки
соответствует не изображению, а форме
объектов и несет в себе больше
информации о них, чем любая модель
двухмерной графики
алгоритмы визуализации и выполнения
топологических операций (например,
построение сечений) довольно сложны
дает возможность автоматически решать при построении сложных моделей число
задачи построения иллюзии перспективы, граней растет с поражающей
теней и бликов при различном освещении стремительностью, что не только делает
сетчатую модель не слишком компактной,
но и требует колоссальной
вычислительной мощности
модель дает возможность с
минимальными затратами труда строить
изображение смоделированной сцены в
любом ракурсе
аппроксимация плоскими гранями
приводит к значительной погрешности,
особенно при моделировании сложных
поверхностей
будучи по своей природе векторной,
сохраняет многие достоинства, присущие
векторной модели изображения
повышенные требования к пользователю,
подразумевая у него наличие развитого
пространственного воображения
Воксельная модель
Воксельная модель
ВОКСЕЛЬНАЯ МОДЕЛЬДостоинства
Недостатки
возможность представлять
внутренность объекта, а не только
внешний слой
большое количество информации,
необходимое для представления
объемных данных
простая процедура отображения
объемных сцен
значительные затраты памяти,
ограничивающие разрешающую
способность, точность моделирования
простое выполнение топологических
операций (например, чтобы показать
сечение пространственного тела,
достаточно воксели сделать
прозрачными)
проблемы при увеличении или
уменьшении изображения; например, с
увеличением ухудшается разрешающая
способность изображения
Функциональные модели
Достоинства функциональных моделей
легкая процедура расчетакоординат каждой точки;
небольшой объем
информации для
описания сложных форм;
возможность строить
поверхности на основе
скалярных данных без
предварительной
триангуляции.
Шуховская башня – пример использования
гиперболоида вращения
Геометрической параметризацией называется
параметрическое моделирование, при котором
геометрия каждого параметрического объекта
пересчитывается в зависимости от положения
родительских объектов, его параметров и
переменных.
Геометрическая параметризация
oo
Хорошая идея – изменить один или несколько
параметров и посмотреть, как будет вести себя при
этом вся модель.
Конструктор, в случае параметрического
проектирования, создает математическую модель
объектов с параметрами, при изменении которых
происходят изменения конфигурации детали,
взаимные перемещения деталей в сборке и т.п.
Геометрические операции над моделями
Над телами, как и над другими геометрическимиобъектами, можно выполнять операции –
совокупность действий над одним или несколькими
исходными телами, которая приводит к рождению
нового тела. Одними из основных операций для
двух тел являются булевы операции.
o Булевыми операциями называют операции
объединения, пересечения и вычитания тел, так
как они выполняют одноименные операции над
внутренними объемами тел (над множествами
точек пространства, находящимися внутри тел).
Операция объединения
o Результатом операции объединения двух тел является тело,которое содержит точки, принадлежащие внутреннему
объему как первого, так и второго тела.
o суть операции: нужно найти линии пересечения граней тел,
удалить ту часть первого тела, которая попала внутрь второго
тела и ту часть второго тела, которая попала внутрь первого
тела, а из всего остального построить новое тело.
Два исходных тела
Объединение тел
Операция пересечения
o Результатом операции пересечения двух тел является тело,которое содержит точки, принадлежащие внутреннему объему
как первого, так и второго тела.
o Суть операции пересечения тел: нужно найти линии
пересечения тел, удалить ту часть первого тела, которая не
попала внутрь второго, и ту часть второго тела, которая не
попала внутрь первого, а из всего остального построить новое
тело.
Два исходных тела
Пересечение тел
Операция вычитания
o Результатом операции вычитания двух тел является тело, котороесодержит точки, принадлежащие внутреннему объему первого, но не
принадлежащие внутреннему объему второго тела.
o Суть операции вычитания тел: нужно найти линии пересечения тел,
удалить ту часть первого тела, которая попала внутрь второго, и ту часть
второго тела, которая не попала внутрь первого, а из всего остального
построить новое тело. Результат операции зависит от того какое тело
вычитается.
Два исходных тела
Разность тел
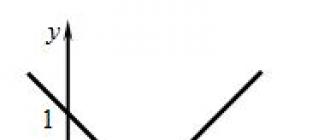
Если два снимка установлены в такое же положение в котором они находились во время фотографирования, сократив расстояние между точками S1 и S2 до размера базиса проектирования b1 , то получим геометрическую модель местности А’С’D’ подобную участку местности АСD.
Геометрическая модель местности определяется как совокупность точек пересечения соответствующих проектируемых лучей.
Основные понятия:
Базис фотографирования В - расстояние между центрами проекции S1 и S2.
Связка проектируемых лучей - это совокупность проектируемых лучей принадлежащих центру проекции S.
Лучи - это лучи проходящие через центр проекции S и идентичной точки пары снимков.
Базисная плотность - это плотность содержащий базис фотографирования и один (любой) проектируемый луч.
Главная базисная плотность - плотность, содержащая базис фотографирования и один главный луч.
Базис проектирования b - это расстояние между центрами проекций S1 и S2 двух связок, по которой построена модель.
Внутреннее ориентирование снимка - это связки, восстановленные с помощью проектируемых камер.
Взаимное ориентирование снимков - это проектирование камеры с восстановленными связками, которые перемещаются друг относительно друга и устанавливают их так, чтобы лучи пересекались, тогда снимки займут такое же положение, как и во время съемки.
Взаимное ориентирование снимков м.б. достигнуто двумя способами:
Угловыми движениями обеих камер
Движение 1-й камеры (при неподвижной 2-й)
В связи с этим различают 2 системы взаимного ориентирования снимков:
в 1-й неподв. счит. базис фотограф., во 2-й левый снимок. 1-я сист. 2-я сист.В этой сист. базис фотограф. счит. горизонт. независим. от его положен. в пространств. £1 - продольн угол наклона левого снимка те угол в гл. базисной плоск. м/д перпенд. к базису фотограф и гл лучом левой связки. £2 - продольн. угол наклона прав. снимка ǽ1 - угол повор. лев. снимка ǽ2 - угол повор. прав. снимка w2 - взаимн. поперечн. угол наклона
Поперечн. параллакс - это разность ординат соот. т-к прав и лев снимк. q=y1-y2 Трансф. снимк. когда базис фотограф. и снимк. горизонт., оси х лев и прав снимк. лежат на одной прямой и ордин. точек будут равны q0=y01-y02=0
Если измерен. ордин. не равны на снимк., то они взаимн. не ориент.
Продольн. параллакс - это разность абсцисс точек и зависит от формата снимка продольн. перекр и рельефа. р=х1-х2
а1а1=х1; а2а2=-х2; S2A’//S1A; а2а1’=а1а1=х1; а2а1’=х1-х2=р; АА’=В
1. ∆S2а2а1’~∆S2AA’; ; (1); (2)т.е. для гор. снимка парал. равен базису фотограф. в масш. съемки
2. ∆S1о1а1~S1O1A; ; ; ; ; Н=-Z; с учетом ф(1) Z=-B×f/p. В совр. приб. использ способ мнимой марки, в нем для измерения коорд. т-к исп. 2-е марки Т1 и Т2. Если одновр. расматр. две марки, то они сольют. в 1-у Т, если совмещ. Т1 и Т2 с соотв. т-ми а1 и а2 на сним., то марка восприним. совмещ. с пов-тью модели. Если марка Т2 не совмещ. с одноимен. т-ой а2, то видимая простр. марка Т’’ будет восприним. выше или ниже поверхн. модели.
28. Дешифрирование снимков для составления топографических и кадастровых планов и карт.
Дешифрирование – процесс распознавания по фотоизображению предметов и контуров местности, границ землевладений и землепользований, установление их качественной и количественной характеристик и вычерчивание их условными знаками.
В зависимости от содержания, дешифрирование делят на:
Топографическое;
Специальное.
При топографическом дешифрировании со снимков получают информацию о земной поверхности и расположении на ней объектах.
Основой методической классификации дешифрирования являются средства считывания и анализа видеоинформации. Исходя из этого, выделяют следующие основные методы:
1)Визуальный – информация считывается и анализируется человеком;
2)Машино-визуальный – информация предварительно преобразовывается машинами с целью облегчения последующего визуального анализа;
3)Автоматизированный – считывает со снимков и анализ выполнения машинами при активном участии оператора;
4)Автоматический – дешифрирование полностью выполняется машинами, человек определяет задачи и задает программу обработки.
Методика генерализации информации при дешифрировании базируется в основном на методике картографической генерализации, т.к. основной объем дешифрированных работ выполняется в целях создания топографических и специальных карт.
Нормы генерализации:
1) 4мм 2 для пахотных земель, залежей, улучшенных луговых земель, вкрапленных в них других земель;
2) 10мм 2 для немелиорируемых луговых земель;
3) 50мм 2 для одноименных различных по качественным признакам с/х земель;
4) 100мм 2 для контуров кустарника, бурелома, горелого или сухостойного леса;
5) озера, пруды дешифрируют независимо от их размеров;
6) линейные контура – если их длина превышает 1см, промоины если их длина превышает 0,5см.
Технологическая последовательность работ:
1)Составление технического проекта и сметы. На этом этапе определяются, какие карты масштабом 1:10000 подлежат обновлению. Границы аэрофотоснимка устанавливаются так, чтобы она покрывала полные планшеты. Аэрофотосъемку выполняют в масштабе 1:15000;
2)Подготовительные работы. Включает сбор, систематизацию, анализ и подготовку материалов съемки, юридических, картографических, справочных и др. материалов;
3)Камеральное дешифрирование. На снимки с имеющихся карт переносят все подтверждаемые фотоизображением объекты. Так же дешифрируют четко читаемые по фотоизображению объекты, появившиеся после создания карты. При камеральном дешифрировании не показывают: границы землепользований и землевладений, границы территориальных и административно-территориальных единиц, границы охранных зон, границы разделения земель по видам. Эти объекты будут установлены и отображены при выполнении полевого дешифрирования;
4)Полевое дешифрирование. Уточняются характеристики объектов;
5)Оформление и приемка материалов;
6)Составление технического отчёта.
Дешифрирование населенных пунктов начинается с выделения и вычерчивания магистральных улиц (1мм), прочих улиц, переулков, проездов, тупиков(0,5мм). Постройки разделяются по огнестойкости и размерам. Кварталы с преобладанием огнестойких построек закрашиваются розовым цветом, не огнестойкие – голубым цветом. Постройки размеры стен, которых в натуре не превышают 10м, в зависимости от формы показывают внемасштабным условным знаком, прямоугольником 0,7 × 1мм или квадратом 1 × 1мм.
Введение в трехмерное моделирование
Современные 3D – системы проектирования позволяют создавать трехмерные модели самых сложных деталей и сборок. Используя наглядные методы формирования объемных элементов, конструктор оперирует простыми и естественными понятиями основание, отверстие, фаска, ребро жесткости, оболочка и т. д. При этом процесс конструирования может воспроизводить технологический процесс изготовления детали. После создания 3D – модели изделия конструктор может получить его чертеж без рутинного создания видов средствами плоского черчения.
Геометрические модели
При решении большинства задач в области автоматизированного конструирования и технологической подготовки производства необходимо учитывать форму проектируемого изделия. Из этого следует, что геометрическое моделирование, понимаемое как процесс воспроизведения пространственных образов изделий и исследования характеристик изделий по этим образам, является ядром автоматизированного проектирования. Информация о геометрических характеристиках объекта используется не только для получения графического изображения, но и для расчета различных характеристик изделий, технологических параметров его изготовления и т. д. На рис. 1. показано, какие задачи решаются с помощью геометрической модели в системе автоматизированного проектирования (САПР). Под геометрическими моделями понимаются модели, содержащие информацию о форме и геометрии изделия, технологическую, функциональную и вспомогательную информацию.
Рис. 1. Задачи, решаемые с помощью геометрической модели
Развитие методов и средств геометрического моделирования определило изменение ориентации графических подсистем САПР. В САПР можно выделить два вида построения графических подсистем:
1. Ориентированные на чертеж.
2. Ориентированные на объект.
Системы первого поколения, ориентированные на чертеж, обеспечивают необходимые условия для создания конструкторской документации. В таких системах создается не объект (деталь, узел), а графический документ.
Эволюция графических подсистем САПР привела к тому, что системы, ориентированные на чертеж, постепенно утрачивают свое значение (особенно в области машиностроения) и все большее распространение получают системы, ориентированные на объект. На рис. 2 показана эволюция ориентации графических подсистем САПР за последние десятилетия.
Рис. 2. Ядро графической подсистемы САПР:
а – чертеж; б – данные чертежа; в – трехмерная геометрическая модель
На начальных этапах разработки и внедрения САПР основным документом обмена между различными подсистемами был чертеж (рис. 2а). Следующее поколение графических подсистем использовало в качестве данных, через которые обеспечивался обмен с функциональными подсистемами САПР, данные чертежа (рис. 2б). Это позволило перейти на безбумажную технологию проектирования. В графических подсистемах, интегрированных САПР, ядром являются трехмерные геометрические модели проектируемых изделий (рис. 2в). При этом различные двумерные изображения трехмерной модели формируются в таких подсистемах автоматически.